Máquina de paletização e carregamento de cimento ensacado
Originalmente, o cimento ensacado saía da fábrica principalmente por carregamento manual ou com equipamentos semiautomáticos, e a mão de obra era necessária para receber o material. Com a escassez de mão de obra e o aumento dos custos trabalhistas, as empresas precisam de sistemas de carregamento totalmente automatizados para substituir o trabalho manual e reduzir custos. Durante o processo de ensacamento do cimento, os trabalhadores ficam expostos a uma grande quantidade de poeira, o que os torna propensos a doenças ocupacionais como a pneumoconiose.

O carregador robótico é, na verdade, a aplicação de um manipulador em um sistema de ensacamento de cimento. O manipulador possui controle preciso, o que pode aumentar a eficiência, reduzir a intensidade do trabalho dos funcionários, melhorar o ambiente de trabalho e reduzir o consumo de energia. Seu uso liberou mão de obra e desempenhou um papel importante no desenvolvimento do setor. O carregador de cimento totalmente automático pode se adaptar a diferentes tipos de veículos e carregá-los automaticamente. Seu sistema de reconhecimento utiliza laser e escaneamento 3D para obter informações sobre o veículo, e o sistema de posicionamento obtém informações sobre a localização do veículo por meio de múltiplos sensores a laser. O robô combina essas informações para pegar, planejar e ensacar automaticamente os sacos de cimento.
Princípio de funcionamento deSistema automático de carregamento de cimento ensacado Agente Carregador de cimento Gachn gourp
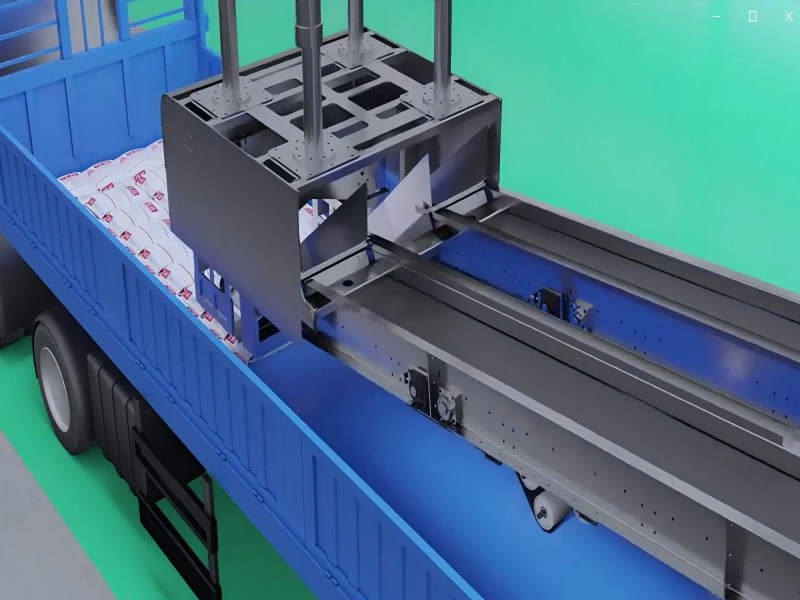
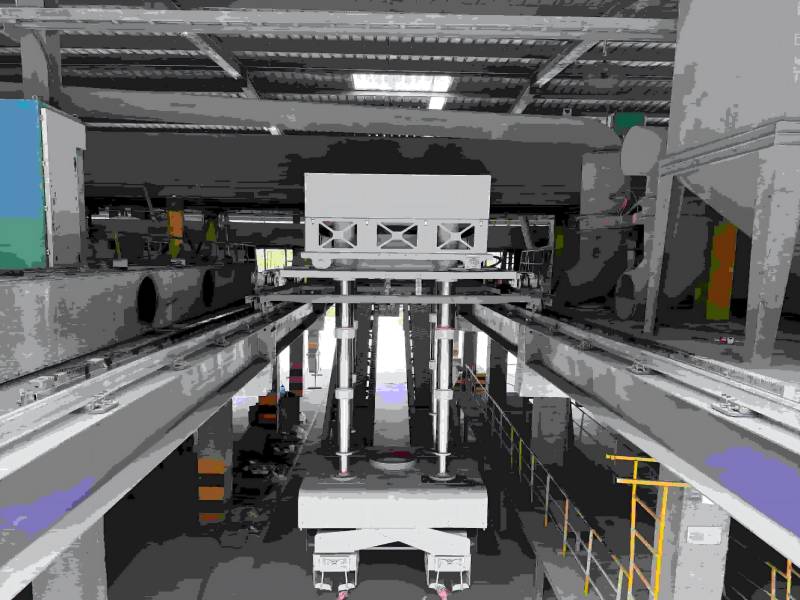
O sistema de carregamento e paletização automática de cimento ensacado da Gachn Gourp Loader Factory adota tecnologia de escaneamento 3D, que permite localizar e escanear com precisão o formato externo do veículo para atingir o objetivo de posicionamento preciso do carregamento, intertravamento interativo entre o sistema de carregamento e a máquina de embalagem, e carregamento automático. A capacidade de movimentação livre da Gachn Gourp Loader em uma área reduzida se deve ao uso de um guincho com mecanismo telescópico tridimensional, que permite o controle de modelagem e a operação coordenada dos mecanismos dos eixos X, Y e Z.
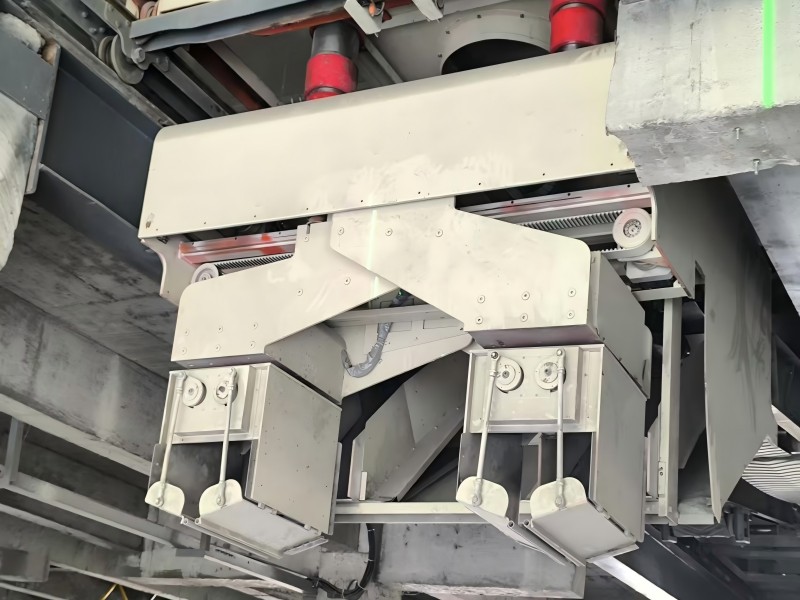
Sistema de remoção de poeira
O sistema automático de carregamento de cimento ensacado Dealer Gachn gourp loader está equipado com um sistema de remoção de poeira, composto por uma coifa de remoção de poeira, uma tubulação de remoção de poeira e uma máquina de remoção de poeira, o que pode reduzir significativamente a poeira levantada durante o processo de carregamento. A maioria das fábricas de cimento já possui sistemas de remoção de poeira, sendo necessário apenas modificar as tubulações antes do uso.
O coletor de pó pode processar um volume de ar de até 100.000 m³/h.

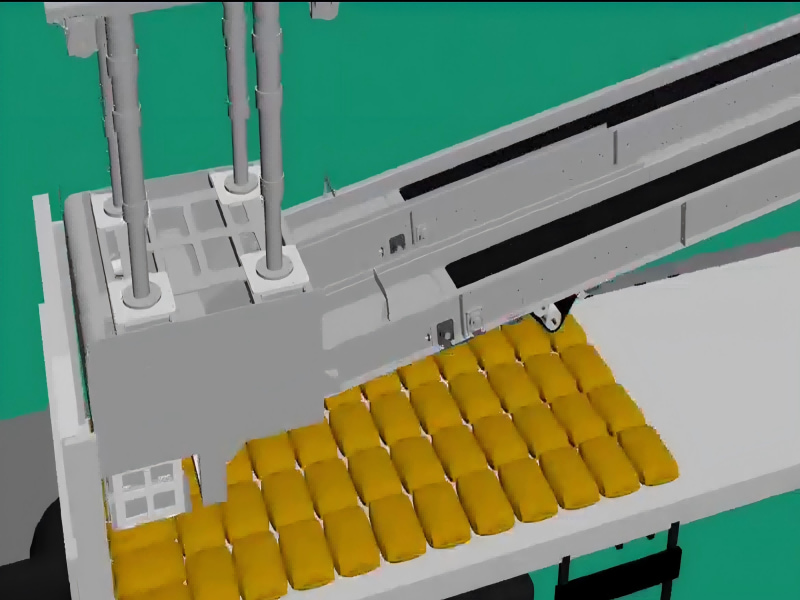
O carregador automático de cimento Gachn Gourp pode realizar a embalagem.
1. Material de carregamento: cimento ensacado
2. Especificações do cimento ensacado: 50 kg/saco, 650 mm (comprimento) × 400 mm (largura) × 140 mm (espessura)
3. Velocidade de ensacamento da máquina de embalagem: 120 t/h
4. Capacidade do carregador automático: ≥90 t/h
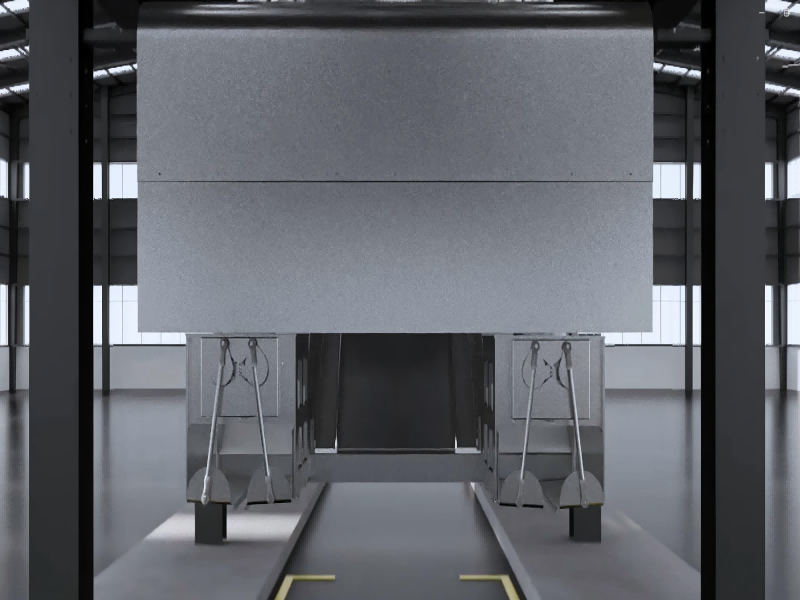
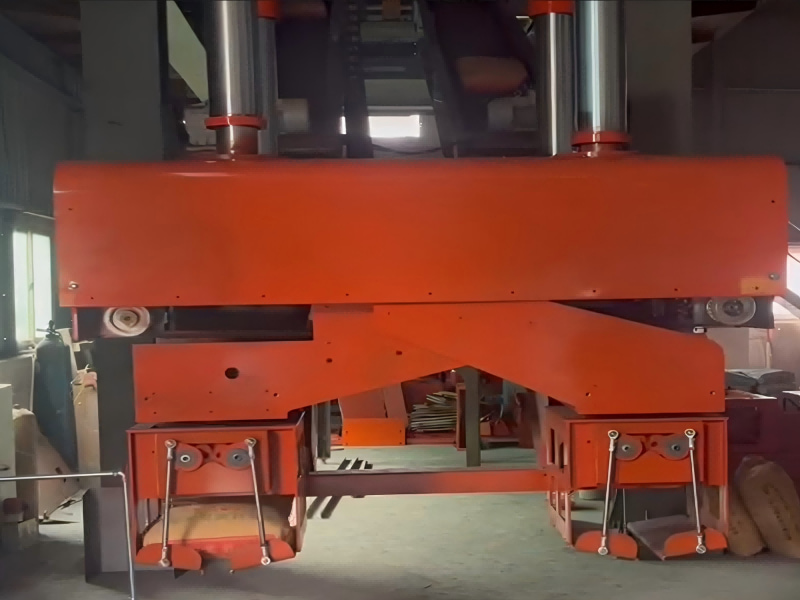
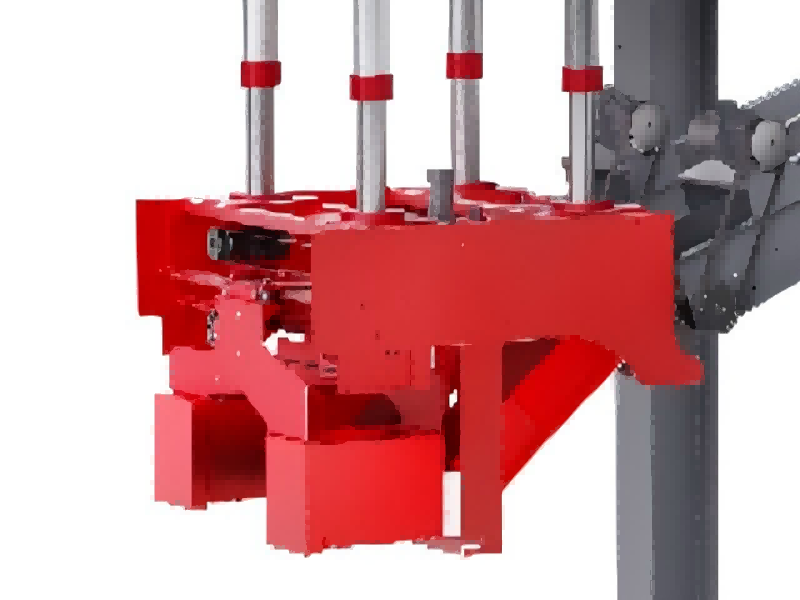
Carregando host
O mecanismo de coleta de poeira na parte frontal do robô carregador consiste em um mecanismo telescópico de fixação de tubos, um duto de ar telescópico, uma calha de coleta de poeira, um duto vertical de coleta de poeira e outros mecanismos. O duto vertical de coleta de poeira e a parte frontal do veículo entram completamente no compartimento de carga, garantindo que a poeira seja coletada de forma rápida e eficiente.
Sistema de digitalização de veículos (digitalização 3D)
O sistema de escaneamento veicular Gachn Gourp Loader (escaneamento 3D) não só realiza o escaneamento e a identificação da estrutura do veículo, como também escaneia o tanque de combustível na grade dianteira do compartimento e as lonas enroladas de alguns veículos. Além disso, identifica os compartimentos com barras de amarração. Através de cálculos internos do sistema, é gerado o layout correspondente para o carregamento dos compartimentos, automatizando o cálculo do carregamento secundário.
Grupo de painel de controle e sensor:
O conjunto de painéis de controle e sensores do carregador robótico inclui principalmente um painel com sistema de controle de movimento com tela de LED, um painel de operação com tela sensível ao toque para reinicialização automática/manual, um sistema de exibição com decodificação de vídeo integrada, áudio, câmera digital de alta definição com conexão de rede, cabos específicos para o robô, instrumentos de sensor (dispositivo de detecção de identificação contínua de pacotes, dispositivo de detecção de entrada de pacotes, dispositivo de detecção de subpacotes, dispositivo de detecção de posicionamento), sistema de resfriamento automático do painel de controle e outros componentes. Ele permite a integração de sistemas locais e em nuvem, e a construção de uma plataforma inteligente para o carregador, juntamente com a rede 5G, possibilita o compartilhamento de sistemas e o gerenciamento hierárquico, criando as condições necessárias para a construção inteligente de fábricas de cimento.
Software do sistema:
O software do sistema é dividido principalmente em software de sistema integrado e software de leitura de cartões, e atinge o objetivo de modelagem inteligente e algoritmo de movimento adaptativo.
O software de sistema integrado do carregador robótico consiste em software de escaneamento, software de acionamento, software de controle automático do sensor de elevação, software de controle automático de transporte, software de controle do sistema de carregamento inteligente, software de controle do sistema básico, software de controle do carregador automático e outros sistemas de software. O sistema de software é baseado no software de controle do sistema básico e no software de acionamento, e coopera para realizar o escaneamento de informações da carroceria do veículo (incluindo o tensionamento), elevação no eixo Z, movimento nos eixos X e Y, transporte por correia, carregamento inteligente, etc.
O software de leitura de cartões do robô carregador é dividido em software de leitura de cartão e software de leitura de cartão de identificação, sendo ambos utilizados em conjunto. Quando o veículo passa o cartão com sucesso duas vezes, o peso da carga é convertido em número de sacos carregados pelo computador interno, e a informação do número de sacos é importada para o "cérebro" do robô carregador através do sistema de software. Nesse momento, o robô emite com precisão as instruções de quantidade de carga correspondentes.
Efeito da aplicação:
Como demonstrado pelo efeito de carregamento após a utilização do robô carregador pela nossa empresa, o robô carregador completou a arquitetura de plataforma em nuvem do carregador inteligente, concretizando a combinação da plataforma local com a plataforma em nuvem, bem como o serviço remoto inteligente e o compartilhamento de carregamento. Não só o usuário pode resolver falhas do carregador no local, como o fabricante também pode resolver remotamente e rapidamente os problemas técnicos encontrados pelos usuários durante a utilização.



















 IPv6 REDE SUPORTADA
IPv6 REDE SUPORTADA